1 工程概况
京新高速公路(五环路―六环路段)上地铁路分离式立交桥是京包高速公路工程的一部分,全长510 m,为46+46+230+98+90 m五跨连续独塔单索面预应力钢筋混凝土斜拉桥。本桥上跨既有京包铁路、城铁十三号线,与既有京包铁路相交处铁路里程为K22+756,公路里程为K3+55.703,相交角度19度。斜拉
索主塔施工地处闹市,场地狭窄,前有地铁站及密集的居民区,后有加油站及密集居民区,两侧各有一个地下通道,中间夹有13号城铁线及一条京包线,施工环境复杂,为整个工程施工的重点与难点。
2 塔柱施工总体方案
2.1 总体方案概述
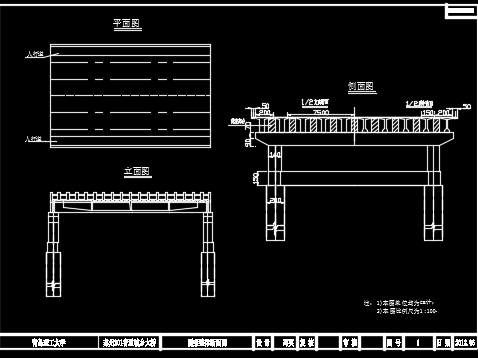
本桥主塔柱高度距承台顶面99 m,呈水滴状,由下塔柱,中塔柱,上塔柱三部分组成。下塔柱高11 m。中塔柱高40 m,为双斜柱,矩形变截面,内倾角22 °43'08''。上塔柱高48 m,为刻槽矩形变截面,直线+圆曲线变化。下塔柱采用常规工艺一次整体浇注,中、上塔柱施工分为20个节段进行,前两个节段施
工完毕后,从第三节开始采用液压爬模施工。爬模为4.25 m一个节段,每节段的施工工期为5~7 d。施工阶段划分见图1。
图1 主塔立面图
针对该塔柱独特的外形构造,结合以往爬模施工的经验,从模板系统的选择、拼装、施工三个方面对现有技术进行改进,解决直线与曲线结构施工过程中相互转换和调整的难题。
2.2 模板选择
所有模板采用全钢模板。钢模具有较大的强度与刚度,可满足爬模设备多次拆分改制与循环使用要求。其次,钢模板技术成熟,操作工艺相对简单,组装方便。同时,可保证塔柱混凝土表面平整、光滑,外观质量好。
2.3 爬模系统加工及拼装
爬模系统全部构件采用专业的厂家预制,根据施工实际情况,确定爬模的结构尺寸和最经济的爬模节段,经试拼验收合格后运至现场进行结构拼装。
爬架系统包括:悬挂件及预埋件、爬升导轨、液压顶升设备、2个上部工作平台、1个主工作平台、2个下部工作平台等。主操作工作平台宽3.3 m,工作平台总高15 m。主工作平台由三角支撑与型钢组成,承受整个爬架重量及施工荷载,并通过预埋件将荷载传递到浇筑好的混凝土实体上。主工作平台上部有2层
工作平台,用于模板的支模、收模及混凝土的浇筑。主工作平台下面悬挂2层工作平台,用于液压爬升的操作与混凝土实体的修饰。所有平台构件由型钢连接而成,杆件可以拆开运输,用螺栓和销轴连接,拼装和拆卸极为方便、快捷。
3 爬模施工工作原理及流程
3.1 爬模施工工作原理
爬模的顶升运动通过液压油缸对导轨和爬架交替顶升来实现。导轨和爬模架互不关联,二者之间可进行相对运动。当爬模架工作时,导轨和爬模架都支撑在埋件支座上,两者之间无相对运动。退模后立即在退模留下的爬锥上安装承载螺栓、挂钩连接座,调整上下轭棘爪方向来顶升导轨,待导轨顶升到位,就位
于挂钩连接座上后,操作人员立即转到下平台拆除导轨提升后露出的位于下平台处的挂钩连接座、爬锥等。在解除爬模架上所有拉结之后就可以开始顶升爬模架,这时候导轨保持不动,调整上下棘爪方向后启动油缸,爬模架就相对于导轨运动,通过导轨和爬模架这种交替附墙,互为提升对方,爬模架即可沿着
塔体上预留爬锥逐段提升。
爬升轨道时,上爬升箱不动,油缸伸出,使下爬升箱中的承力块支撑在轨道的踏步块下面。收缩油缸,提升轨道。到位后,上爬升箱中的承力块支撑轨道,完成一个工作循环。如此循环,直至轨道到位。
爬升架体时,下爬升箱中的承力块压在轨道的踏步块上面,油缸伸出,顶升模板。到位后,上爬升箱中的承力块压在轨道的踏步块上面,模板上升一个高度。油缸收缩,提升下爬升箱,使其到上一个踏步块上面,完成一个工作循环。如此循环,直至架体到位。
3.2 爬模施工工艺流程
爬模系统加工试拼装→钢筋绑扎,预埋件安装→爬模系统现场安装→爬模系统爬升→模板就位加固→浇筑混凝土→爬模系统拆除
4 爬模施工关键控制点
4.1 可调模板系统
中塔柱上部自7节段开始,结构由线性变化段过渡到弧线段,由于塔柱保护层厚度误差不能超过5 mm,所以就不能以直代曲,这就要求模板能够调整。
由于结构造型的变化,模板系统在爬升过程中,需要根据结构特点进行模板结构特点的改造来满足施工要求。液压钢模爬模在施工过程中通过对小构件的结构改造来完成整个结构直线段和曲线段施工。在进行直曲转换施工结构改造时,将原有的直线爬轨改成曲线爬轨和相反的曲线爬轨改直线爬轨,并通过调整模板设计改型装置将模板由直线调整到曲线,调整爬轨套件的定位档件使其适应曲线轨道线型要求,改变爬轨踏步块的距离,调整每次提升的高度。随着工程的施工进展,每次完成结构的阶段施工,要对整个架体结构构件的空间位置进行调整,以满足施工平台的空间位置和安全的要求。
在浇筑完成前一节混凝土后,若需调整弧面的曲率,无需将模板拆下,只需利用调节螺栓即可实现,如图2所示。由于钢板具有一定的韧性,在施加适当的外力后产生变形而不被破坏,利用这一特征,通过几何学原理,在使用时,如需变化曲率,只需要松紧调节螺栓,可以精确到每个丝扣,使面板弯曲成设计所需的弧度。且钢模板周转率较高,安拆方便,混凝土成形外观好,在大大加快施工的进度的同时,也能满足混凝土浇筑的质量要求。 施工过程中,弧度的改变导致每次调整的角度都不同。这就要求在模板的调整过程中,要把接口处断开。接口处的缝隙可以用玻璃胶密封,也可以用原子灰勾缝。
由于从直线段过渡到弧线段,而直导轨只能沿直线运动,为了既满足爬升的需要,又能节省材料,可把内侧拆下的轨道现场压弧,与实体弧线平行,这样,导轨就能沿实体弧度行进。由于每次爬升的角度不一样,这就要在爬升过程中利用塔吊调整角度,保证导轨能顺利就位于附墙装置。
4.2 钢筋及预埋件的安装
塔柱钢筋主要采取直螺纹接头连接,钢筋连接在劲性骨架安装到位后进行,并依托劲性骨架进行定位。连接方法如下:用全站仪在已经接长的劲性骨架上测放出塔柱纵、横轴线,钢筋施工人员根据塔柱纵、横轴线,在劲性骨架上放出钢筋安装位置线,塔吊起吊主筋,将其与下节主筋对接,使用管钳旋转套筒,将两根钢筋连接起来,再根据劲性骨架上放出主筋位置将主筋定位固定。
预埋件设置时除应注意位置、数量正确外,还应与周围钢筋及模板固定牢固,以防止混凝土浇筑时位置错动,爬锥定位中心允许偏差应为±5 mm。对于外露的永久性埋件做好防锈蚀、防污染工作,临时施工埋件待工程完工后及时拆除并作好混凝土表面修补工作。
4.3 爬模现场安装
先进行主要承重结构架体平台和附属结构操作平台的拼装,平台拼装完毕后,将主承重架体平台吊放安装到预埋爬模施工的定位预埋件上,调整架体撑脚和定位销栓进行固定。主平台安装完毕后,附属轻型操作平台对应主平台的内外位置从上而下进行安装。
塔柱在浇筑达到爬架安装要求的基本高度后,开始进行爬架、模板的安装工作。爬架按0层平台与-1号平台、+1号平台、+2号平台、-2号平台单元顺序进行安装,各单元分别需在组拼平台上组拼完成,然后各单元整体起吊安装在塔柱预埋件上就位。
主附平台安装完毕后利用塔吊进行导轨和模板的吊放安装,导轨和模板均从架体的上部向下进行安装,在插入导轨的过程中应注意轨道轴线位置满足施工要求,将所有的构件安装完毕,进行架体构件的定位调整,达到施工操作要求。
模板的安装是在爬架安装、调整完成后进行。模板拼装时,必须按照顺序逐块对位,连接成框架后临时固定,采用液压千斤顶微调,严禁强拉硬顶,使模板变形。
架体防护设施在结构拼装完毕后进行安装。
4.4 爬模系统的爬升
(1)爬升施工必须建立专门的指挥管理组织,制定管理制度,控制台操作人员应进行专业培训,合格后方可持证上岗操作,严禁其他人员操作。
(2)导轨爬升前,其爬升接触面应清除粘结物和涂刷润滑剂,检查爬升箱承力块是否处于提升导轨状态,确认架体固定在承载体和结构上,确认导轨锁定楔板和底端支撑已松开。
(3)导轨爬升由油缸和上、下爬升箱自动完成,爬升过程中,应设专人看护,确保导轨准确插入上层挂钩连接座。
(4)导轨进入挂钩连接座后,须及时插上楔板挂住导轨上端的挡块,同时调整导轨底部支撑,然后转换爬升箱承重块爬升功能,使架体支承在导轨踏步块上。
(5)架体与模板爬升前,须拆除模板上的全部对拉拉杆及妨碍爬升的障碍物;清除架体上剩余材料,解除相邻分段架体之间、架体与塔体之间的连接,确认爬升箱处于爬升工作状态;解除保温棚四角的连接,和工作平台踏板的连接。检查液压设备均处于正常工作状态,承载体受力处的混凝土强度满足架体爬
升要求,确认架体支腿已退出,安全插销已拔出;架体爬升前要组织安全检查,合格后方可爬升。
(6)爬升应由总指挥统一指挥,各分段机位应配备足够的监控人员。
(7)架体爬升到达挂钩连接座时,应及时插入安全插销。并旋出架体调节支腿,顶撑在塔体上,使架体从爬升状态转入施工固定状态。
(8)爬模过程中如发生偏移,应立即纠偏。对于爬模装置的整体偏差,可采用钢丝绳和手动葫芦进行纠偏;对于局部偏差可以通过支腿调节丝杠进行模板截面调节和垂直度调节。
4.5 混凝土浇筑
模板加固完毕后进行混凝土浇筑施工,混凝土采用汽车泵送进行浇筑,加强振捣施工和拆模后的养生施工,保证混凝土施工质量。混凝土浇筑完毕后,以模板顶口线为基准,对靠近模板、宽约1.5 cm的混凝土顶面内外接缝作修整、压实、抹平处理,在进行施工缝凿毛时,严禁破坏这条接缝,以确保上下层混凝
土接缝顺直。凿毛由人工完成,当处理层混凝土强度达到2.5 mPa时,由人工开始凿除混凝土表面的水泥砂浆和松软层,经凿毛处理的混凝土面用压缩空气或高压淡水清理干净。由于索塔模板底口无接口模,为防止混凝土浇筑时漏浆以及上下两节段混凝土结合部出现过大的错台,待浇节段的模板底部应压紧已
浇节段的混凝土顶部外表面,不得留有空隙。混凝土浇筑前,再次对接缝表面进行检查清理;混凝土浇筑过程中,要经常观察模板与下节段混凝土面的贴紧情况,若出现漏浆,立即旋紧相应部位的对拉杆螺母及支撑螺旋;接缝两侧的混凝土应充分振捣,以使缝线饱满密实。
4.6 爬模系统拆除
拆除工作遵循从上而下的顺序,先拆除临建附属,再拆除模板和上层架体部分,最后拆除下层平台和承重结构。
5 结语
液压钢模板曲线爬模施工能满足塔柱不同倾角和线型尺寸施工要求,一套施工设备完成整个结构工程施工,同比液压木模爬模及支架法施工,能最大限度的节约人力、物力和设备的用量,减少施工设备的周转,提高施工效率,保证施工安全和结构外观质量。上地铁路分离式立交桥工程施工中,整个爬模系统不
需要外接动力,仅以电力带动液压系统提升模板,整个模板系统施工达到零排放,对施工环境没有产生任何污染,为工程所在范围的北京市民营造了良好的生活环境,满足了工程对工期、质量、安全和经济性等的要求。
参考文献
[1] 杨雁翔,沈小峰,夏海余,等.温州世贸中心桁架导轨式爬架应用技术[J].施工技术,2007(5).
[2] 尤东锋,要志东.斯里兰卡某水塔工程圆弧模板施工技术[J].施工技术,2009(12).
[3] 液压整体提升大模工法.2005-2006年度国家一级工法.