摘 要:本文设计了一套城市轨道交通牵引驱动与控制实验系统,给出了系统的硬件电路,详细分析了试验系统的组成、工作原理与实现的功能,通过该系统可以设计和验证各种控制算法,为人们研究开发轨道交通控制系统提供了实验平台,具有重要的理论意义和实用价值。
关键词:轨道交通;牵引驱动;控制算法
轨道交通车辆牵引与控制系统是一个融合了先进控制、变频驱动、通讯、机械振动、降噪、降温冷却等多学科的知识和技术,由于其频繁启动,对设备的稳定性、安全性要求很高。本文设计了一套城市轨道交通牵引驱动与控制试验系统,给出了系统的硬件电路,详细分析了试验系统的组成、工作原理与实现的功能,通过该系统可以设计和验证各种控制算法,为人们研究开发轨道交通控制系统提供了实验平台,具有重要的理论意义和实用价值。
一、设计总体方案
1. 配电设备方案。配电设备利用学校现有的三相380V AC 50Hz电网,通过总电源屏进行独立的用电管理。总电源屏除了具有电压、电流等电参量的检测功能外,集成了过流、缺相等保护功能,从而保证试验系统不会对学校其余的用电单元产生影响。功率因数补偿屏则是为了提高整个试验系统的功率因数而设计的,同时可以起到减小谐波干扰的作用。
2.模拟电网。即由感应调压器TM1、十二脉波整流变压器TM2和十二脉波整流器U1组成了模拟电网。TM2有两组独立的、相位相差30°的次边绕组,U1则是两个三相全桥六脉波整流器串联组成。通过使用十二脉波整流电源,同时在高压电器箱中设计匹配的平波电抗器,可以大大提高模拟电网的电源品质。为了满足模拟电网DC1000V~DC1800V的变化需求,增加了三相感应调压器,通过调节调压器的输出电压来改变直流十二脉波整流电源的直流输出电压。感应调压器的最低输出电压接近0V,从而能够利用调压器进行异步电动机的空载特性试验,也能利用感应调压器完成异步电动机作为发电机状态运行的试 验。
3.高压电器箱。高压电器屏作为逆变器的前端输入级,集成了高速断路器、线路滤波器、接触器、过压保护等。高速断路器具有双向过流保护功能,可由DCU控制系统控制断开,高速断路器的状态可在控制PC机的显示器上显示。接触器分为线路接触器和预充电接触器,两接触器的吸合与断开完全由DCU控制系统控制,接触器的动作参数与状态受DCU控制系统的监控。线路滤波器主要起到滤波和限制瞬态过流的作用,减小对供电系统的干扰。线路滤波器采用自然走行风冷。
4.逆变器。采用VVVF牵引逆变器,主要由三相逆变器和驱动控制单元(DCU)组成。三相逆变器的功率元件采用IGBT,采用模块化设计,采取热管散热技术,保证牵引逆变器在规定的条件下正常工作。DCU采用32位的多个微处理机控制,采用模块化设计和PWM控制技术。DCU通过列车通信网与司机控制台及控制PC机进行通信。容量能满足牵引特性和制动特性试验的要求。有良好的电磁兼容性,不会对通讯、信号、供电等系统产生干扰。逆变器的保护功能有:输入电流过流;制动斩波器过流;输入电压过压和欠压;主电路差动电流;输出相电流过流;缺相或3相不平衡;功率元件过热。
5.异步牵引电动机。异步牵引电动机采用已经应用于上海地铁A型车的JD118A型异步牵引电动机。
6. 转矩转速传感器。转矩转速传感器采用具有LonWorks网络通讯功能的JCZ2型智能转矩转速传感器。
7.速度同步装置。速度同步装置主要是通过机械和电的耦合来准确地模拟机车的运行速度,同时为驱动线路模拟信号装置的运转。
8.负载系统及其调节方式。依照IEC61377- 1推荐的典型电路原理,采用了背靠背的试验原理,由一套相同的逆变器和异步牵引电动机组成。整个系统的有效运行则是通过特殊的试验控制系统程序对U2、U3进行精确、快速的控制来实现的。在牵引工况下负载异步牵引电动机做发电机运行,在制动工况下负载异步牵引电动机做电动机运行。同时为了与实际情况尽可能一致,每个逆变器都配备了斩波电阻和制动电阻,模拟电网不能进行能量反馈时的工作状态。①斩波电阻。能承受制动斩波模块故障所引起的过流或短路;能消耗的能量要能满足制动特性试验的要求,所有电制动能量都消耗在制动电阻上;采用强迫风冷,进风口应设网罩,以防止杂物吸入,网罩应便于拆卸与清洗;系统应对斩波电阻的电流进行监控和保护;电阻元件及支撑元件应安装牢固、稳定、有良好的耐热性,有足够的电气间隙和爬电距离。②负载电阻。负载电阻由几个不同电阻值的功率电阻组成,它们可以通过电控开关的切换获得不同的组合,提供不同的负载特性。③网络控制方案。设置了一个标准化的司机控制、显示平台(分试验控制室显示平台和试验参数展示平台),司机控制台与逆变器之间采用MVB网络进行通讯,从系统调节的给定方式、显示等模拟实际运行状况,同时司机控制台具备与逆变器之间通过硬连线进行通讯的功能,从而可以对运行方向、牵引、制动、惰行、快速制动、紧急制动等工况进行模拟试验。试验系统的开关控制、连锁(逻辑控制) 采用分布式PLC控制,PLC之间、PLC与上位机之间的通讯采用PROFIBUS现场总线。对转矩转速传感器的数据的读取则是通过LonWorks网络实现,提高了通讯速率和可靠性。控制PC机与PXI数据采集系统之间通过LAN网进行连接,可以保证PXI与信号调理单元与被测对象就近布置,从而减小线路干扰,提高系统的可靠性。④数据采集系统。对于变流器、异步电动机的电压、电流等高速信号的测量将同时采用基于PXI的虚拟测试仪器,对这些关键参数进行读数和谐波分析,增加了测试系统的灵活性,同时该PXI测试系统的硬件资源还可以与其他试验系统共享。⑤技术参数。模拟电网的额定输出电压 :DC1500V; 输出电压范围 :DC1000V~DC1800V;额定输出功率:620kW。⑥系统性能指标。控制系统:逆变器输出的电压、电流或这转矩的精度小于1%。测试系统:试验系统中非常重要的一环,总体要求为:对于交直流电流、电压的测量小于±1%,转速测量小于±0.1%或±1r/min,转矩测量小于±2%。
二、实验内容
1.信号检测与通讯试验。试验系统一方面对实际线路的一些状态信号进行了模拟和采集,另一方面该试验系统的测试和控制涵盖了电压、电流、温度、DI、DO等信号的转换、信号调理和测量、分析,同时具有LAN-PROFIBUS、LonWorks等多种网络通讯协议,为教学提供了一个非常好的实例。借助基于PXI的虚拟仪器数据采集系统,学生可以自行开发信号测试与分析处理程序,进行实践,必将大大促进学生理论与实践相结合的能力。
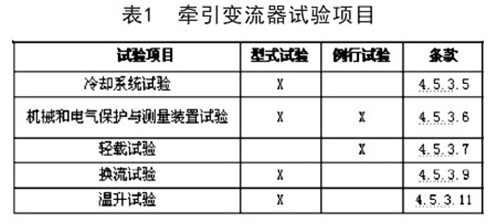
2.牵引变流器及电子控制装置的试验。试验系统允许教师可以按照IEC61287- 1:2005对牵引变流器进行试验研究,试验项目为表1所示。
3.逆变器供电的电动机及其控制系统组合试验。利用地面试验系统教师能完成IEC61377- 1:2006、TB/T3117规定的变流器供电时电动机及其控制系统综合试验的试验研究工作,用以验证一种新的电传动组合系统的定额、特性和性能,为优化系统参数设计提供可靠的试验数据。开展的试验项目为表2所示。
该实验系统可以完成信号检测与通讯试验、牵引变流器及电子控制装置的试验、逆变器供电的电动机及其控制系统组合试验,对地铁牵引驱动控制策略开展研究提供了基础保障。